728x90
728x90
일단 라이다를 이동 못 하는 상황에선 rosbag파일로 진행해봤습니다...
rosbag play -l ~/Desktop/lanerosbag/2024-02-14-15-18-47.bag이 전에 lanedetection을 시도하면서 저장했던 losbag
%clear; close all; clc;
rosshutdown;
rosinit('http://localhost:11311')
tftree = rostf;
pause(3);
roi = [0, 18, -18, 18, -2, 2];
params = lidarParameters('OS1Gen1-64',1024);
lidarSub = rossubscriber('/ouster/points', "DataFormat", "struct");기존에 진행했던 것과 똑같습니다.
ROI는 여기서 필요 없습니다.
pretrainedNetwork = load('trainedPointSegNet.mat');
net = pretrainedNetwork.net;
classNames = [
"background"
"car"
"truck"
];pre-trained 된 네트워크 파라미터를 불러오고, class도 붙여줍니다.
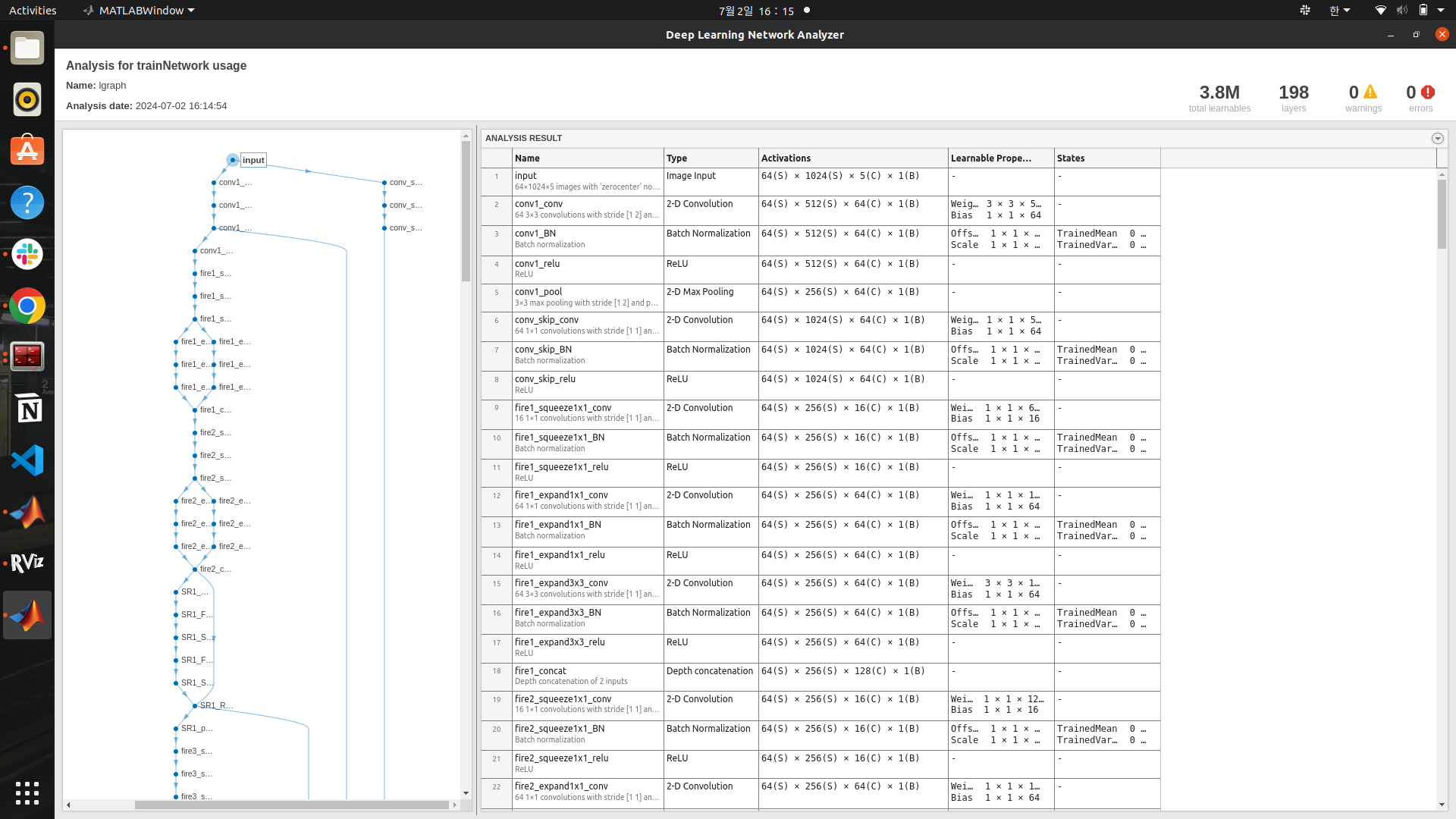
네트워크 구조는 상당히 복잡하고 380만개의 파라미터로 이루어져 있습니다.
figure;
while true
lidarData = receive(lidarSub);
xyzData = rosReadXYZ(lidarData);
intensityData = rosReadField(lidarData, 'intensity');
ptCloud = pointCloud(xyzData, 'Intensity', intensityData);
%ptCloud = pointCloud(xyzData);
ptCloudOrg = pcorganize(ptCloud, params);
I = helperPointCloudToImage(ptCloudOrg);
predictedResult = semanticseg(I, net);
helperDisplayLidarOverlayImage(I, predictedResult, classNames);
title('Semantic Segmentation Result');
end반복마다 네트워크 결과를 보여주는데... 밖에서 해봐야 알 것 같네요
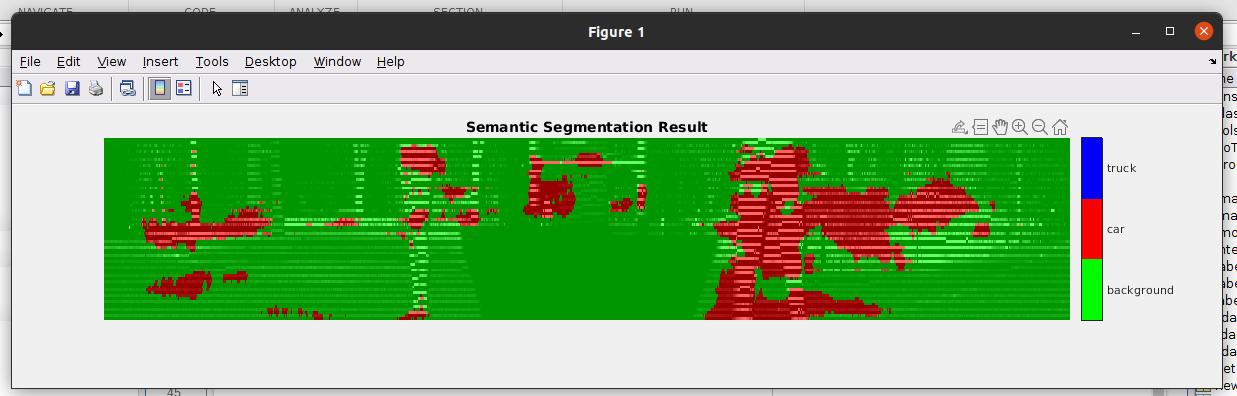
결과는 좋지 않네요....
전부 초록색으로 나와야 하는데...
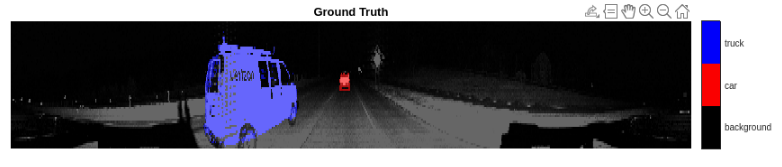
예시는 확실하게 깔끔하게 나옵니다.,,,
728x90
'자율주행 자동차 > 인지' 카테고리의 다른 글
| Python Lidar - Morai와 연동하여 clustering하기 - 준비 중 (0) | 2024.07.30 |
|---|---|
| 라이다란 - LiDAR 기초, 라바콘 인지, 딥러닝 (0) | 2024.07.03 |
| NVIDIA의 생성형 AI를 통한 End to End 자율주행 (0) | 2024.06.30 |
| 차선, 정지선 Detection (0) | 2024.05.08 |
| 차선 인지 발표 준비 (0) | 2024.04.29 |