728x90
728x90

일단 맵을 위와 같이 바꿔주었습니다...
원본을 숫자 하나하나 쳐가면서 바꿉니다.
vehicleDims.Wheelbase = 0.2;
vehicleDims.Width = 1.1;
vehicleDims.Length = 1.6;erp와 맞게 차량 정보도 수정해줍니다.
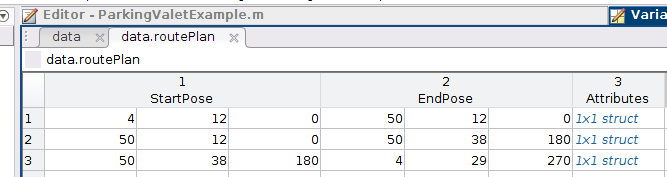
경로도 변경해 줍니다. 우린 한바퀴 돌아서 평행주차를 할 예졍입니다.
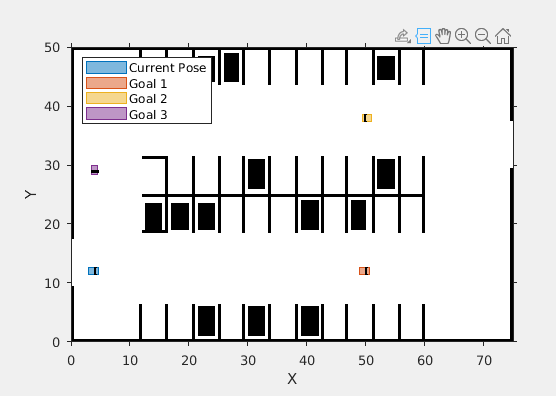
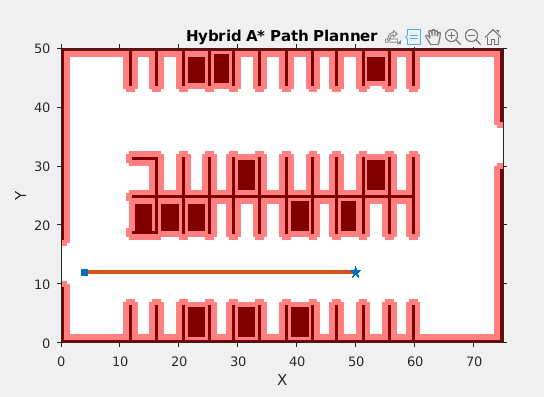
그럼 이러한 경로가 나오겠네요
다나왔는데 실수로 날려먹었....

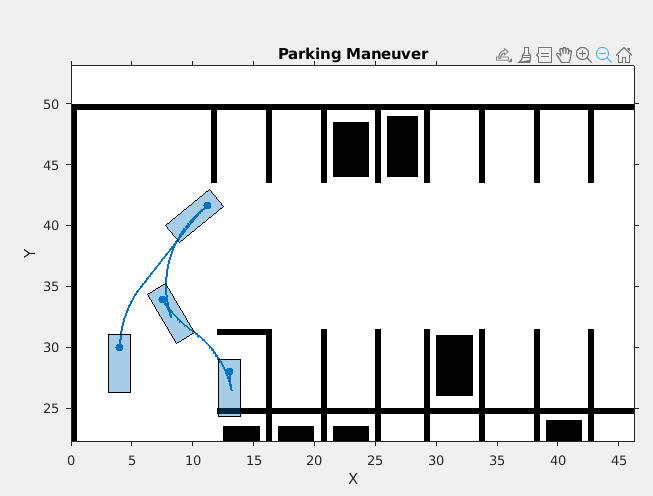
잘 돈다.
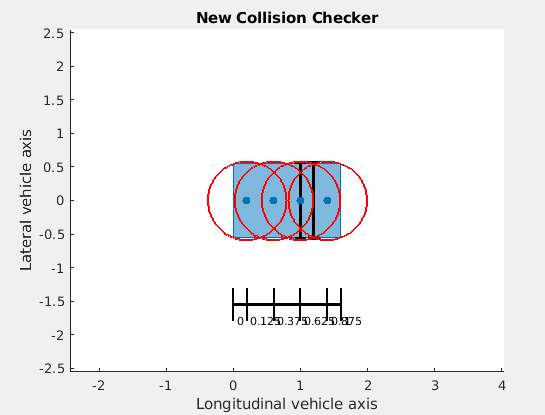
충돌 영역도 변경해주고
평행 주차가 안되네요....?
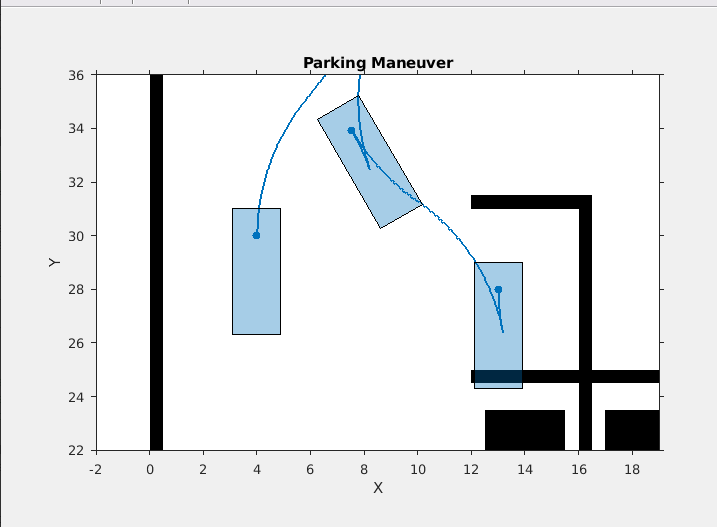
일단 이렇게 나옵니다.
진짜 우연하게 진행되었나 보네요 다시 하니까 죽어도 안되는....
Parallel Parking Using RRT Planner and MPC Tracking Controller - MATLAB & Simulink - MathWorks 한국
이 예제의 수정된 버전이 있습니다. 사용자가 편집한 내용을 반영하여 이 예제를 여시겠습니까?
kr.mathworks.com
이걸로 교체할 생각도 해봐야 겠네여
728x90
'자율주행 자동차' 카테고리의 다른 글
| 자율주행 자동차 erp-42 gazebo simulation 상 automatic parking 구현, matlab 코드 첨부 (2) | 2024.03.05 |
|---|---|
| 주차 알고리즘 - 인지,판단,제어 종합 (0) | 2024.02.06 |
| 주차 알고리즘 matlab (53) | 2024.01.30 |
| 자동주차 알고리즘 (1) | 2024.01.29 |
| 자율 주행 관련 코드 (0) | 2023.11.06 |