728x90
728x90
vdims = vehicleDimensions;
vdims.Length = 2.4;
vdims.Width = 1.1;
vdims.Wheelbase = 1.6;
egoWheelbase = vdims.Wheelbase;
distToCenter = 0.5*egoWheelbase;우리 차량 크기를 입력해줍니다.
vehiclePose = updateVehiclePose(modelStatesSub, tftree);
egoInitialPose = vehiclePose';
v=0;
w=0;
egoTargetPose = [20.759-distToCenter,-3,0];그리고 차량 현재 위치를 받아와서 현재 위치를 넣어주고, 목표 위치도 넣어줍니다.
Tv = 0.1;
xlim = [20.759-distToCenter-10 20.759-distToCenter+10];
ylim = [-3-4 -3+4];
yawlim = [-3.1416 3.1416];
bounds = [xlim;ylim;yawlim];
stateSpace = stateSpaceReedsShepp(bounds);
stateSpace.MinTurningRadius = 7;목표 지점을 기준으로 크기도 잡아줍니다.
stateValidator = parkingStateValidator(stateSpace);
planner = plannerRRTStar(stateSpace,stateValidator);
planner.MaxConnectionDistance = 4;
planner.ContinueAfterGoalReached = true;
planner.MaxIterations = 2000;플레너도 만들어주고
rng(9, 'twister');
[pathObj,solnInfo] = plan(planner,egoInitialPose,egoTargetPose);
figure;
hold on;
plot(solnInfo.TreeData(:,1),solnInfo.TreeData(:,2),'y.-'); % tree expansion경로 탐색 시작
p = 100;
pathObj.interpolate(p+1);
xRef = pathObj.States;
worldWaypoints = xRef;
plot(xRef(:,1), xRef(:,2),'b-','LineWidth',2)
pp.Waypoints = worldWaypoints(:,1:2);그 경로중 최적 경로 찾아서 waypoint에 넣어주기
a = vehiclePose';
if v >= 0
plot(a(1),a(2),'r.', 'MarkerSize', 20);
else
plot(a(1),a(2),'g.', 'MarkerSize', 20);
end이제 여기서부턴 while문 안에서의 내용
현재 위치를 그래프에 그려줍니다.
그럼 끝
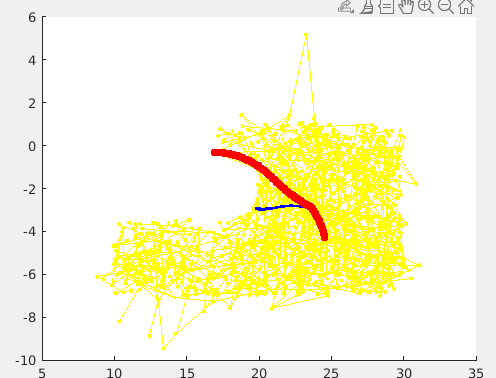
이게 추종 알고리즘을 변경하지 않고 따라갔더니 후진을 안하네요 ㅎㅎ
PP엔 후진이 없다는 것을 까먹었습니다..
.... 후진을 못하네요...........
728x90
'자율주행 자동차 > 판단' 카테고리의 다른 글
| nlmpc를 활용한 주차 알고리즘 (0) | 2024.02.05 |
|---|---|
| pp는 후진을 못하니 nlmpc로 간다! (0) | 2024.02.01 |
| 평행주차 알고리즘 matlab (43) | 2024.01.31 |