728x90
728x90
Parallel Parking Using RRT Planner and MPC Tracking Controller - MATLAB & Simulink - MathWorks 한국
이 예제의 수정된 버전이 있습니다. 사용자가 편집한 내용을 반영하여 이 예제를 여시겠습니까?
kr.mathworks.com
아이디어는 여기서 가지고 왔습니다.
vdims = vehicleDimensions;
egoWheelbase = vdims.Wheelbase;
distToCenter = 0.5*egoWheelbase;차량 초기갑 입력해줍니다.
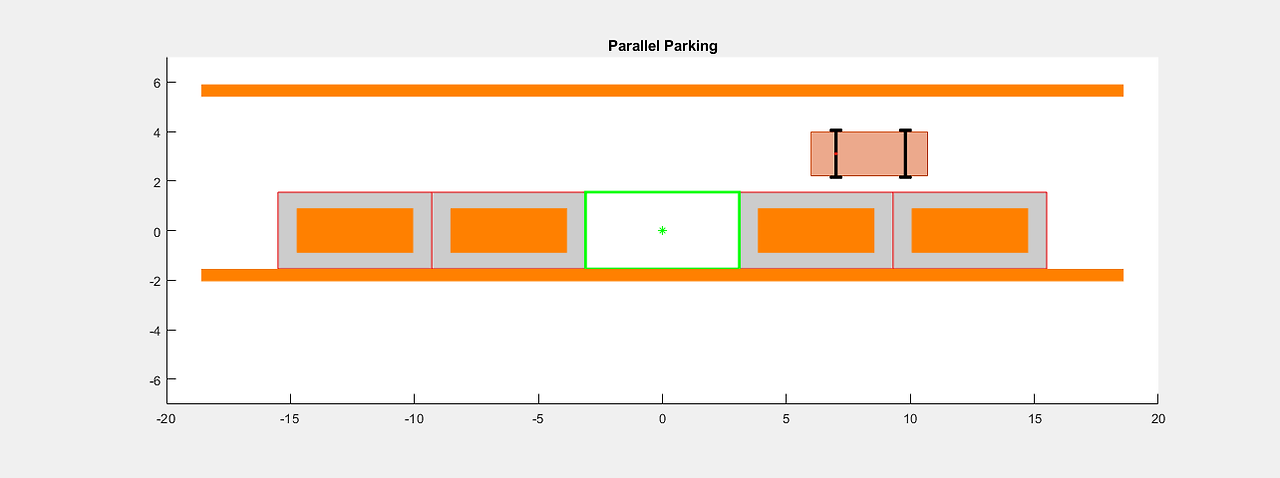
egoInitialPose = [7,3.1,0];[0,0]에 차량 주차하기 위해 초기위치 설정
egoTargetPose = [-distToCenter,0,0];뒷 바퀴 기준으로 포즈 등록해두기
Tv = 0.1;
helperSLVisualizeParking(egoInitialPose,0);시뮬레이션은 0.1초 간격!
여기서 각도는 라디안입니다!
xlim = [-10 10];
ylim = [-2 6];
yawlim = [-3.1416 3.1416];
bounds = [xlim;ylim;yawlim];
stateSpace = stateSpaceReedsShepp(bounds);
stateSpace.MinTurningRadius = 7;공간을 설정해줍니다.
stateValidator = parkingStateValidator(stateSpace);충돌 검사기도 만들어줍니다.
planner = plannerRRTStar(stateSpace,stateValidator);
planner.MaxConnectionDistance = 4;
planner.ContinueAfterGoalReached = true;
planner.MaxIterations = 2000;RRT * planer도 만들어줍니다.
rng(9, 'twister');
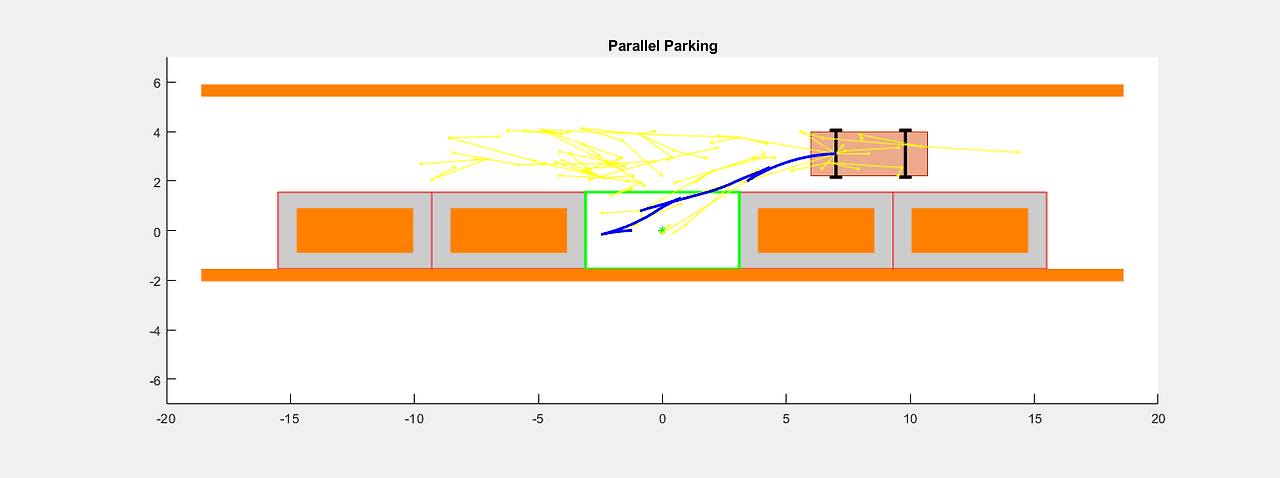
[pathObj,solnInfo] = plan(planner,egoInitialPose,egoTargetPose);목표까지 경로를 계획해줍니다.
f = findobj('Name','Automated Parallel Parking');
ax = gca(f);
hold(ax, 'on');
plot(ax,solnInfo.TreeData(:,1),solnInfo.TreeData(:,2),'y.-'); % tree expansiontree expansion을 그려줍니다.
p = 100;
pathObj.interpolate(p+1);
xRef = pathObj.States;점을 연결하여 궤적을 생성합니다.
plot(ax,xRef(:,1), xRef(:,2),'b-','LineWidth',2)경로 작성!
mpcverbosity('off');비선형 MPC를 만들기 위해 명령창 메세지를 비활성화 시킵니다.
nlobjTracking = nlmpc(3,3,2);컨트롤러 개체를 만듭니다. (state, input, output)
Ts = 0.1;
pTracking = 10;
nlobjTracking.Ts = Ts;
nlobjTracking.PredictionHorizon = pTracking;
nlobjTracking.ControlHorizon = pTracking;샘플시간 (TS) 예측범위(predictionHorizon) 및 제어 범위(ControlHorizon)를 지정
nlobjTracking.MV(1).Min = -2;
nlobjTracking.MV(1).Max = 2;
nlobjTracking.MV(2).Min = -pi/6;
nlobjTracking.MV(2).Max = pi/6;속도(m/s) 및 조향각(rad) 제한조건 대입
nlobjTracking.Weights.OutputVariables = [1,1,3];
nlobjTracking.Weights.ManipulatedVariablesRate = [0.1,0.2];컨트롤러 튜닝 가중치 지정
nlobjTracking.Model.StateFcn = "parkingVehicleStateFcnRRT";
nlobjTracking.Jacobian.StateFcn = "parkingVehicleStateJacobianFcnRRT";제어기 상태 함수와 쟈코비안 정의
nlobjTracking.Optimization.CustomEqConFcn = "parkingTerminalConFcn";터미털 제약조건 정의
validateFcns(nlobjTracking,randn(3,1),randn(2,1));설계 검증
x = egoInitialPose';시뮬레이션 속도를 높이기 위해 하는 작업 중 초기 차량상태 지정
u = [0;0];초기 제어 입력 지정
[coredata,onlinedata] = getCodeGenerationData(nlobjTracking,x,u);코드 생성 데이터를 얻는다.
mexfcn = buildMEX(nlobjTracking,'parkingRRTMex',coredata,onlinedata);컴트롤러 시뮬레이션하기 위핸 MEX함수 빌드
xTrackHistory = x;
uTrackHistory = u;
mv = u;
Duration = 14;
Tsteps = Duration/Ts;
Xref = [xRef(2:p+1,:);repmat(xRef(end,:),Tsteps-p,1)];시뮬레이션 하기 전에 데이터 초기화
for ct = 1:Tsteps
% States
xk = x;
% Compute optimal control moves with MEX function
onlinedata.ref = Xref(ct:min(ct+pTracking-1,Tsteps),:);
[mv,onlinedata,info] = mexfcn(xk,mv,onlinedata);
% Implement first optimal control move and update plant states.
ODEFUN = @(t,xk) parkingVehicleStateFcnRRT(xk,mv);
[TOUT,YOUT] = ode45(ODEFUN,[0 Ts], xk);
x = YOUT(end,:)';
% Save plant states for display.
xTrackHistory = [xTrackHistory x]; %#ok<*AGROW>
uTrackHistory = [uTrackHistory mv];
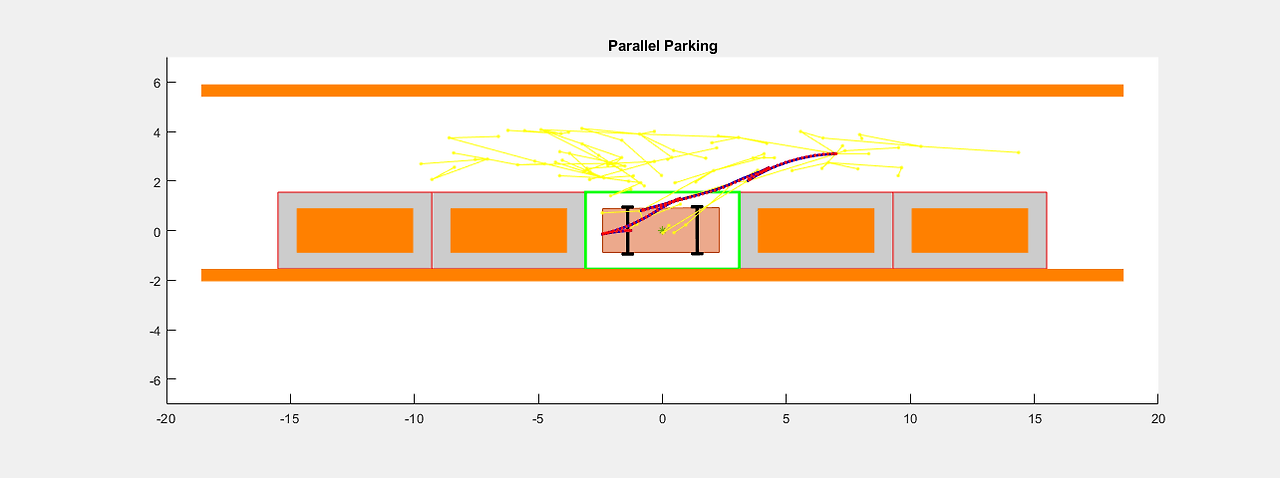
end시뮬레이션 진행
plotAndAnimateParkingRRT(p,xRef,xTrackHistory,uTrackHistory);시각화
728x90
'자율주행 자동차 > 판단' 카테고리의 다른 글
| nlmpc를 활용한 주차 알고리즘 (0) | 2024.02.05 |
|---|---|
| pp는 후진을 못하니 nlmpc로 간다! (0) | 2024.02.01 |
| 평행주차 matlab - erp 적용 (0) | 2024.01.31 |