https://arxiv.org/abs/2304.11477
LLM+P: Empowering Large Language Models with Optimal Planning Proficiency
Large language models (LLMs) have demonstrated remarkable zero-shot generalization abilities: state-of-the-art chatbots can provide plausible answers to many common questions that arise in daily life. However, so far, LLMs cannot reliably solve long-horizo
arxiv.org
로봇을 조종하는 LLM 모델이네요. 장기 계획을 못하는 것이 문제라 그걸 해결하려고 나온 논문입니다.!
문제: 대형 언어 모델(LLM)은 자연어 처리에서 강점을 보이지만, 장기 계획 문제(long-horizon planning)를 정확히 해결하지 못함.
방법: LLM+P는 LLM으로 자연어 문제를 PDDL로 변환하고, 클래식 플래너로 최적의 계획을 생성한 뒤 이를 다시 자연어로 변환하는 프레임워크.
성과: 7개 도메인 실험에서 LLM+P는 대부분의 문제에서 최적의 계획을 성공적으로 생성하며, LLM 단독 사용보다 높은 정확도를 보임.
한계: 문맥(Context) 제공에 의존하며, 자동 문제 감지와 PDDL 파일 오류 복구 기능이 부족.
의의: LLM의 언어 이해력과 클래식 플래너의 논리적 강점을 결합하여 AI 에이전트의 계획 및 실행 능력을 획기적으로 개선.

논문 요약: "LLM+P: Empowering Large Language Models with Optimal Planning Proficiency"
1. 해결하려는 문제
기존의 대형 언어 모델(LLMs)은 자연어 기반 상호작용에서 강력한 일반화 능력을 보여주지만, 장기 계획 문제(long-horizon planning)를 정확하게 해결하는 데 실패합니다. 이 문제는 로봇과 같은 실제 환경에서 계획을 수립하고 행동을 결정하는 데 있어 중요한 장애물로 작용합니다.
- 한계점:
- LLM은 언어적 능력(linguistic competence)은 우수하지만, 기능적 능력(functional competence)에서 부족합니다.
- 복잡한 계획 문제를 처리하는 데 필요한 논리적 사고와 상태 전환 능력이 미흡합니다.
2. 사용한 방법
LLM과 기존의 클래식 플래너(Classical Planner)를 결합한 프레임워크인 LLM+P를 제안하였습니다. 이 방법은 LLM의 자연어 처리 능력을 활용하여 계획 문제를 PDDL(Planning Domain Definition Language) 형식으로 변환한 후, 클래식 플래너를 사용해 최적의 해결책을 찾고 이를 다시 자연어로 변환합니다.
구체적인 과정
- 문제 변환:
- 자연어로 기술된 문제를 PDDL 형식으로 변환 (LLM 활용).
- 문제 해결:
- 변환된 PDDL 파일을 클래식 플래너(예: Fast-Downward Planner)에 입력하여 최적 또는 올바른 계획을 생성.
- 결과 변환:
- 생성된 계획을 다시 자연어로 변환해 사용자에게 제공 (LLM 활용).
3. 실험 결과
7개 도메인(BLOCKSWORLD, BARMAN 등)과 140개의 문제를 통해 LLM+P를 검증하였습니다.
- 비교 모델:
- LLM 단독 사용, Tree of Thoughts(ToT) 기반 방법, LLM+P.
- 주요 결과:
- LLM+P는 대부분의 도메인에서 최적의 계획을 생성하는 데 성공.
- 예시(Context)를 제공하지 않을 경우 성능이 급격히 하락.
- FLOORTILE과 같은 공간적 복잡성이 높은 도메인에서는 실패 사례 존재.
성공률 (성공/최적 계획 비율, %):
- BLOCKSWORLD: 90%
- BARMAN: 20%(최적: 100%)
- FLOORTILE: 0%
- TERMES: 20%
- STORAGE: 85%
4. 한계점
- 문맥 의존성:
- LLM+P는 주어진 문제에 대해 적절한 문맥(Context)이 제공되지 않으면 성능이 크게 저하됩니다.
- PDDL 파일 생성 오류:
- 초기 상태를 누락하거나 잘못 정의하는 경우, 계획 생성이 실패할 수 있음.
- 자동 감지 부족:
- LLM+P는 현재 문제를 PDDL로 변환해야 할지를 자동으로 판단하지 못함.
5. 타당성 및 아쉬운 점
타당성:
- 장점:
- LLM의 자연어 처리 능력과 클래식 플래너의 최적화 능력을 결합하여 각자의 한계를 보완.
- 로봇의 작업 효율성과 사용 편의성을 향상시키는 가능성을 입증.
아쉬운 점:
- 문제 범위 제한:
- 테스트된 문제는 로봇 계획과 같은 특정 영역에 국한됨. 범용성 확인이 필요.
- 사람의 개입:
- 도메인 정의 파일(PDDL)이 미리 제공되어야 하며, 이는 자동화의 한계로 작용.
- LLM의 미흡한 오류 처리:
- 잘못된 PDDL 파일 생성 시 자체적으로 수정하지 못함.
6. 향후 연구 방향
- 자동화:
- LLM이 문제를 자동으로 인식하고 PDDL 변환 여부를 결정하도록 개선.
- 범용성 확장:
- 더 많은 도메인과 복잡한 문제로의 확장 실험.
- 인간 개입 최소화:
- PDDL 도메인 파일 생성 과정 자동화.
연구 활용 방안
이 논문은 AI 에이전트 개발에 있어 중요한 시사점을 제공합니다. 이를 활용해 다음과 같은 방식으로 연구를 진행할 수 있습니다:
- 자동화된 계획 시스템:
- 에이전트가 자연어로부터 문제를 이해하고 실행 가능한 계획을 생성하도록 설계.
- 다중 에이전트 협력:
- 여러 AI 에이전트가 협력하여 장기적이고 복잡한 문제를 해결하도록 계획 능력 강화.
- PDDL 확장 연구:
- 비로봇 도메인에서도 활용 가능한 새로운 계획 표현 방식 개발.
이 논문과 연관된 논문에 대해 설명해줘
이 논문과 연관된 논문들은 LLM의 한계를 보완하고 강화하기 위해 외부 모듈과 결합하거나, 기존 계획 알고리즘을 활용해 문제 해결 능력을 향상시키려는 연구들입니다. 다음은 주요 연관 연구들에 대한 요약입니다.
1. Planning with Large Language Models
LLM을 계획 도구로 활용하려는 초기 연구들은 주로 LLM 자체의 능력을 향상시키기 위한 방법에 초점을 맞췄습니다.
주요 논문 및 기여:
- SayCan (Ahn et al., 2022):
- LLM을 로봇 계획에 활용하여 자연어로 명령을 내리고 실행 가능한 행동을 추론.
- 특징: 로봇의 행동 가능성(affordance)을 계산하여 실행 가능한 계획만 생성.
- 한계점: 제한된 데이터셋과 단순한 행동 세트로 인해 범용성이 부족함.
- Tree of Thoughts (Yao et al., 2023):
- 계획 문제를 해결하기 위해 트리 기반 탐색을 도입.
- LLM이 각 노드에서 가능한 행동을 예측하고 경로를 평가.
- 한계점: 계산 비용이 매우 높고 장기 계획 문제에서는 비효율적.
- Plansformer (Pallagani et al., 2022):
- Transformer 기반 모델을 활용해 PDDL 형식의 계획을 생성.
- 기여: LLM이 아닌, 계획 전용 모델의 가능성을 탐색.
2. Classical Planning and PDDL Integration
클래식 플래너의 구조적 강점을 활용해 LLM의 부족한 논리적 추론과 상태 전환 능력을 보완하는 연구들이 있습니다.
주요 논문 및 기여:
- Leveraging Pre-trained Large Language Models for Task Planning (Guan et al., 2023):
- LLM이 세상에 대한 세계 모델(world model)을 구축하고 이를 기반으로 계획을 수립.
- 특징: LLM을 계획 모델과 통합해 인간 수준의 목표 추론 가능성을 탐구.
- PDDL Planning with Pretrained Large Language Models (Silver et al., 2022):
- LLM을 활용해 PDDL 형식의 계획 문제를 생성.
- 결과: 제한적인 도메인에서는 성공적인 결과를 보였으나, 도메인 정의가 복잡해질수록 성능이 저하.
- Task and Motion Planning with LLMs (Driess et al., 2023):
- 고차원 작업(task)과 저차원 움직임(motion) 계획을 통합한 연구.
- 장점: 실제 로봇 작업에서의 성공 가능성 증대.
3. Augmenting LLMs with External Modules
LLM의 능력을 외부 도구와 결합해 확장하려는 연구들도 이 논문과 밀접한 연관이 있습니다.
주요 논문 및 기여:
- WebGPT (Nakano et al., 2021):
- LLM이 웹 검색을 통해 실시간으로 정보를 수집하고 정확도를 높임.
- 영향: LLM과 외부 모듈 결합의 가능성을 입증.
- ToolFormer (Schick et al., 2023):
- LLM이 API를 호출해 계산기, 검색 엔진 등 외부 도구를 사용할 수 있도록 학습.
- 특징: 도구 사용 여부를 판단하는 메커니즘 포함.
- AutoTAMP (Chen et al., 2023):
- LLM을 검증 도구로 활용하여 생성된 계획이 목표 조건을 만족하는지 확인.
4. Planning Benchmarks for LLMs
LLM의 계획 능력을 평가하기 위한 표준 벤치마크를 개발한 연구들도 관련 있습니다.
주요 논문 및 기여:
- Valmeekam et al., 2022:
- LLM의 계획 능력을 평가하기 위한 첫 번째 벤치마크 제공.
- 한계점: 복잡한 공간적 관계를 다루는 문제에서는 성능이 낮음.
- Generalized Planning in PDDL Domains with LLMs (Silver et al., 2023):
- LLM이 다양한 PDDL 도메인에서 계획 문제를 해결할 수 있는지 평가.
연관 논문의 시사점
- LLM+P가 차별화되는 점:
- 기존 연구들은 LLM 자체 성능 개선에 초점을 맞췄으나, LLM+P는 LLM과 클래식 플래너의 결합을 통해 최적의 성능을 달성.
- 특히 자연어 → PDDL 변환 → 계획 실행 → 자연어 출력의 통합 프로세스를 제안.
- 앞으로의 연구 방향:
- LLM과 강화학습 통합: LLM+P 프레임워크를 강화학습(RL) 기반 접근법과 결합해 동적으로 문제를 해결.
- 다중 모달 계획: LLM과 비전 모델(vision model)을 통합해 시각적 정보 기반 계획 생성.
이 연구들은 AI 에이전트 연구에 있어 LLM의 한계를 극복하기 위한 다양한 방법론과 도구를 제시하며, 실질적인 문제 해결로의 확장을 촉진합니다.
그럼 이 논문의 방법론에 대해 자세하게 설명해줘
논문 "LLM+P: Empowering Large Language Models with Optimal Planning Proficiency"의 방법론은 대형 언어 모델(LLM)과 클래식 플래너(Classical Planner)를 결합하여 복잡한 계획 문제를 해결하는 데 중점을 둡니다. 이를 LLM+P 프레임워크라고 정의하며, 방법론은 크게 3단계로 나누어 설명됩니다.
1. 전체적인 프레임워크 구조
LLM+P는 자연어 문제를 입력으로 받아 이를 구조화된 형식(PDDL)으로 변환하고, 이를 클래식 플래너로 해결한 뒤 다시 자연어 형식으로 반환합니다. 이는 LLM의 자연어 처리 능력과 클래식 플래너의 논리적 계획 능력을 결합하여 각자의 단점을 보완합니다.
핵심 흐름:
- LLM: 자연어 문제를 PDDL 형식으로 변환.
- 클래식 플래너: 변환된 PDDL 파일을 기반으로 최적의 계획을 생성.
- LLM: 생성된 계획을 자연어로 변환하여 사용자에게 제공.
2. 세부 단계
1) 문제 변환: LLM을 활용한 PDDL 생성
- 설명: 자연어로 주어진 문제를 PDDL(Planning Domain Definition Language) 형식으로 변환합니다.
- PDDL의 구성 요소:
- 객체(Object): 문제에서 다뤄지는 모든 객체를 정의.
- 초기 상태(Initial State): 문제의 현재 상태를 정의.
- 목표 상태(Goal State): 문제 해결을 위해 도달해야 하는 최종 상태.
- 행동(Action): 가능한 행동들과 그 전제 조건 및 효과를 정의.
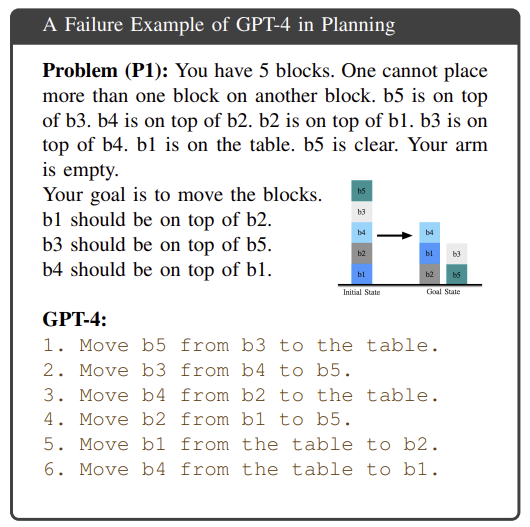
예제
문제 (자연어):
- 블록 쌓기 문제에서, 5개의 블록이 주어진다. 초기 상태와 목표 상태는 아래와 같다.
- 초기 상태: b5는 b3 위, b4는 b2 위, b2는 b1 위.
- 목표 상태: b1은 b2 위, b3은 b5 위, b4는 b1 위.
PDDL로 변환:
(:objects b1 b2 b3 b4 b5 - block)
(:init (on b5 b3) (on b4 b2) (on b2 b1) (on b1 table) (clear b5))
(:goal (and (on b1 b2) (on b3 b5) (on b4 b1)))
- LLM의 역할: 자연어 문제를 기계 번역(machine translation)처럼 PDDL 형식으로 변환.
2) 문제 해결: 클래식 플래너를 통한 계획 생성
- 설명: 생성된 PDDL 파일을 클래식 플래너에 입력하여 최적의 계획(optimal plan)을 생성합니다.
- 사용된 플래너:
- Fast-Downward Planner 사용.
- 두 가지 설정 사용:
- SEQ-OPT-FDSS-1: 최적의 계획을 생성.
- LAMA: 빠른 시간 안에 실행 가능한 계획 생성(최적은 보장되지 않음).
- 주요 작업:
- 계획 생성 과정에서 상태 전환 모델(state transition model)을 활용.
- 초기 상태에서 목표 상태까지 도달할 수 있는 최소 비용 경로를 탐색.
3) 결과 반환: 계획을 자연어로 변환
- 설명: 생성된 PDDL 기반 계획을 다시 자연어로 변환하여 사용자에게 전달합니다.
- LLM의 역할: PDDL 형식을 해석하고, 사용자가 이해할 수 있는 자연어 형식으로 번역.
예제
PDDL 계획:
1. unstack b5 b3
2. putdown b5
3. unstack b3 b4
4. stack b3 b5
5. pickup b4
6. stack b4 b1
자연어로 변환:
- "1. 블록 b5를 b3 위에서 내려놓는다. 2. b5를 테이블 위에 둔다. ..."
3. 특별한 기술 요소
1) In-Context Learning 활용
- 정의: LLM이 미세 조정(finetuning) 없이도 예시 데이터를 제공받아 새로운 작업을 학습하는 능력.
- 적용:
- 문제 설명과 해당 PDDL 예제를 LLM에게 제공하여, 변환의 정확도를 높임.
- 예제가 포함되지 않은 경우, 변환 정확도가 급격히 하락.
2) PDDL 도메인 정의 파일 제공
- 설명: 각 도메인에 대한 고정된 규칙(예: 행동의 전제 조건과 효과)을 정의한 파일을 미리 제공.
- 효과: LLM이 도메인에 특화된 규칙을 직접 학습할 필요 없이, 주어진 규칙을 기반으로 문제 해결 가능.
3) 최적화된 플래너의 강점 활용
- 장점:
- 클래식 플래너는 수학적으로 정확한 상태 전환 모델을 사용하여 논리적으로 완전하고(sound), 최적화된 결과를 보장.
- LLM 단독 사용보다 높은 정확도와 효율성을 보임.
4. 방법론의 가정
LLM+P 프레임워크는 다음과 같은 가정을 기반으로 작동합니다:
- 문맥(Context) 제공:
- 문제와 관련된 PDDL 예제가 반드시 제공되어야 함.
- 도메인 정의 파일:
- 행동 규칙과 세계 상태를 정의한 파일이 존재.
- 문제 인식:
- 사용자로부터 입력된 자연어가 계획 문제임을 LLM이 이해해야 함.
5. 장점 및 차별점
- LLM의 강점 활용:
- 자연어를 구조화된 형식(PDDL)으로 변환하는 작업에 적합.
- 클래식 플래너의 강점 활용:
- 장기 계획 문제와 상태 전환 모델 기반의 논리적 해결 가능.
- 기존 접근법과 차별점:
- LLM 단독 사용이나 단순 강화 접근보다 높은 성능과 정확도.
요약
LLM+P는 LLM과 클래식 플래너의 결합을 통해 복잡한 계획 문제를 해결하는 혁신적인 방법론입니다. 이 프레임워크는 자연어 처리, 상태 전환 모델링, 최적화된 계획 생성이라는 세 가지 주요 작업을 통합하여 높은 정확도와 효율성을 달성합니다. 이를 기반으로 AI 에이전트의 계획 및 실행 능력을 강화하는 데 활용할 수 있습니다.
그럼 이 논문에 결과와 마무리에 대해 자세하게 논문을 기반으로 설명해줘
LLM+P 논문의 결과 및 마무리
1. 실험 결과
논문에서는 LLM+P의 성능을 평가하기 위해 7개 로봇 계획 도메인에서 140개의 실험 사례를 수행하였습니다. 이 실험은 LLM+P의 성능을 LLM 단독 사용 및 Tree of Thoughts(ToT) 기반 접근법과 비교하며, 각 도메인에서의 성공률과 계획의 품질을 분석합니다.
2. 도메인별 성능
다양한 도메인에서 LLM+P는 다른 접근법보다 우수한 성과를 보였습니다.
도메인 설명
- BLOCKSWORLD:
- 블록 쌓기 문제. 초기 상태에서 블록을 재배치하여 목표 상태를 달성.
- 성공률: 90% (최적 계획 제공).
- BARMAN:
- 로봇 바텐더가 음료를 조합하여 칵테일을 만드는 문제.
- 성공률: 20% (최적 계획 성공률 100%).
- FLOORTILE:
- 타일을 특정 패턴으로 칠하는 문제.
- 성공률: 0% (초기 조건 오류로 인해 실패).
- GRIPPERS:
- 물체를 집어서 방 간에 이동하는 문제.
- 성공률: 95% (최적 계획 성공률 100%).
- STORAGE:
- 물체를 특정 창고에 배치하는 문제.
- 성공률: 85%.
- TERMES:
- 블록을 운반하여 복잡한 구조물을 짓는 문제.
- 성공률: 20%.
- TYREWORLD:
- 로봇이 타이어를 교체하고 도구를 적절히 정리하는 문제.
- 성공률: 10% (최적 계획 성공률 90%).
3. 분석 및 주요 발견
- LLM 단독 사용과의 비교:
- LLM 단독으로 생성된 계획은 대부분 실행 불가능하거나 논리적 결함이 있었음.
- 주요 원인:
- 상태 전환 모델 부족.
- 장기적 관계를 고려하지 못함.
- LLM+P의 장점:
- LLM은 PDDL 형식으로 정확히 변환하여 플래너가 최적 계획을 생성할 수 있도록 지원.
- 플래너는 상태 전환 모델을 활용해 논리적으로 완전하고 최적화된 결과를 도출.
- 결과적으로 LLM+P는 LLM 단독 접근법보다 훨씬 더 높은 성공률을 보임.
- 문맥(Context)의 중요성:
- LLM+P는 문맥(Context)을 통해 문제 정의와 PDDL 생성의 정확도를 높임.
- 문맥이 없는 경우, LLM이 올바른 PDDL을 생성하지 못함.
- 실패 사례 분석:
- FLOORTILE 및 TERMES 도메인에서는 PDDL 파일 생성 시 초기 상태 조건을 누락하여 실패.
- 이는 문제의 복잡성 또는 사용자 정의 도메인의 세부 정보를 정확히 표현하지 못한 결과로 분석됨.
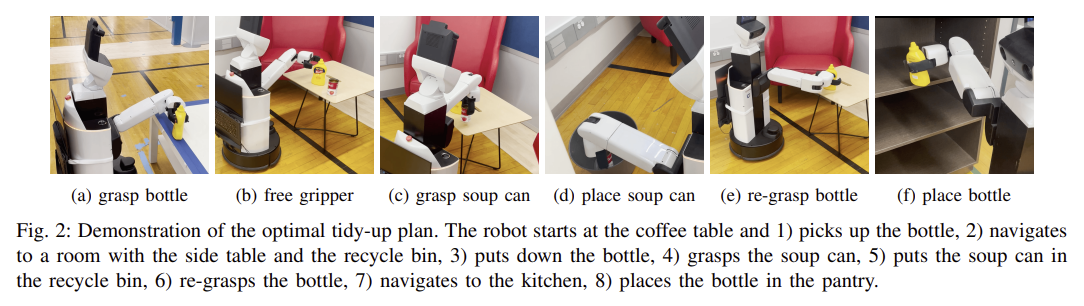
4. 로봇 시뮬레이션 결과
LLM+P는 실제 로봇 시뮬레이션에서도 성공적으로 적용되었습니다.
사례:
- 로봇이 다음과 같은 작업을 수행:
- 테이블에서 머스터드 병을 가져와 팬트리에 배치.
- 빈 수프 캔을 쓰레기통에 버림.
- 결과:
- LLM+P 계획: 로봇이 최적 경로(총 비용 22)로 작업 수행.
- LLM 단독 계획: 서브 최적 경로(총 비용 31)로 작업 수행.
5. 주요 한계
- 문제 자동 감지 부족:
- LLM이 특정 문제를 PDDL로 변환해야 할 시점을 자동으로 판단하지 못함.
- PDDL 의존성:
- 도메인 정의 파일(PDDL)이 미리 제공되어야 하며, 이는 사용자 개입이 필요한 부분.
- 오류 복구 부족:
- PDDL 생성 시 발생하는 오류를 LLM이 자체적으로 수정하지 못함.
6. 결론 및 향후 연구 방향
결론
LLM+P는 LLM과 클래식 플래너의 강점을 결합하여 복잡한 계획 문제를 해결할 수 있는 효과적인 프레임워크임을 입증했습니다. 특히 LLM의 자연어 처리 능력과 플래너의 논리적 정확성을 결합함으로써, 기존 접근법의 한계를 성공적으로 극복하였습니다.
향후 연구 방향
- 자동화된 문제 감지:
- LLM이 특정 입력이 계획 문제인지 자동으로 판단하고 LLM+P를 실행할 수 있도록 개선.
- PDDL 의존성 최소화:
- PDDL 도메인 파일을 자동 생성하거나 학습할 수 있는 방법론 탐색.
- 범용성 확장:
- 로봇 외 다양한 도메인(예: 금융, 의료)에서 LLM+P의 적용 가능성을 검증.
- LLM+P의 학습 개선:
- LLM이 PDDL 생성 과정에서 오류를 수정하거나 도메인 파일을 확장할 수 있는 능력을 학습.
결론 요약
LLM+P는 AI 에이전트의 계획 및 실행 능력을 획기적으로 향상시킬 수 있는 강력한 프레임워크로 평가됩니다. 이 방법론은 LLM의 자연어 이해와 클래식 플래너의 최적화 능력을 결합하여 복잡한 문제를 효과적으로 해결하며, 향후 연구를 통해 범용적이고 자율적인 AI 에이전트 개발의 기반이 될 수 있습니다.